
Published on November 22, 2024 6:46 PM GMT
Imagine a sequence of binary outcomes generated independently and identically by some stochastic process. After observing N outcomes, with n successes, Laplace's Rule of Succession suggests that our confidence in another success should be (n+1)/(N+2). This corresponds to a uniform prior over [0,1] for the underlying probability. But should we really be uniform about probabilities?
I think a uniform prior is wrong for three reasons:
- The uniform prior suggests we should be equally surprised if the underlying probability lies in [0, 0.0001] as in [0.3456, 0.3457]. But this seems wrong. Many simple programs would give probabilities near 0 — for example, any process that succeeds only in rare edge cases. In contrast, it's harder to construct simple programs that give probabilities specifically around 0.3456. The uniform prior fails to capture this fundamental asymmetry in the space of simple probabilistic processes. An appropriate prior distribution would spread probability across a wide range of log-odds.Under the uniform prior, the process is almost surely not deterministic — i.e. the prior likelihood of p being exactly 0 or 1 is zero. This seems wrong. Among probabilistic programs that generate binary outcomes, there are very simple deterministic ones (always output 0 or 1). An appropriate prior should have nonzero prior probability on these simple programs.The uniform prior assigns zero probability to simple fractions like p=1/2 or p=5/6. This too seems wrong - simple rational probabilities should have higher weight. To fix this, we mix in the Thomae distribution, which adds a weight (m·n)^(-α) to each fraction m/(m+n) for every pair 1 ≤ m,n ≤ 100.
I propose this mixture distribution:
w1 lognormal(0, sigma^2) + w2 0.5(dirac(0) + dirac(1)) + w3 thomae_{100}(α) + w4 uniform(0,1)
where:
- The first term captures logistic transformations of normal variables (weight w1), resolving the issue that probabilities should be spread across log-oddsThe second term captures deterministic programs (weight w2), allowing for exactly zero and oneThe third term captures rational probabilities with simple fractions (weight w3), giving weight to simple ratiosThe fourth term captures uniform random number comparisons (weight w4), corresponding to Laplace's original prior
Ideally, our prior should be a mixture of every possible probabilistic program, weighted by 2^(-K) where K is its Kolmogorov complexity. This would properly capture our preference for simple mechanisms. However, such a distribution is impossible to represent, compute, or apply. Instead, I propose my prior as a tractable distribution that resolves what I think are the most egregious problems with Laplace's law of succession.
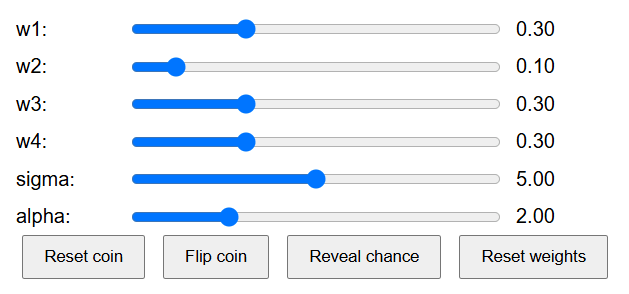
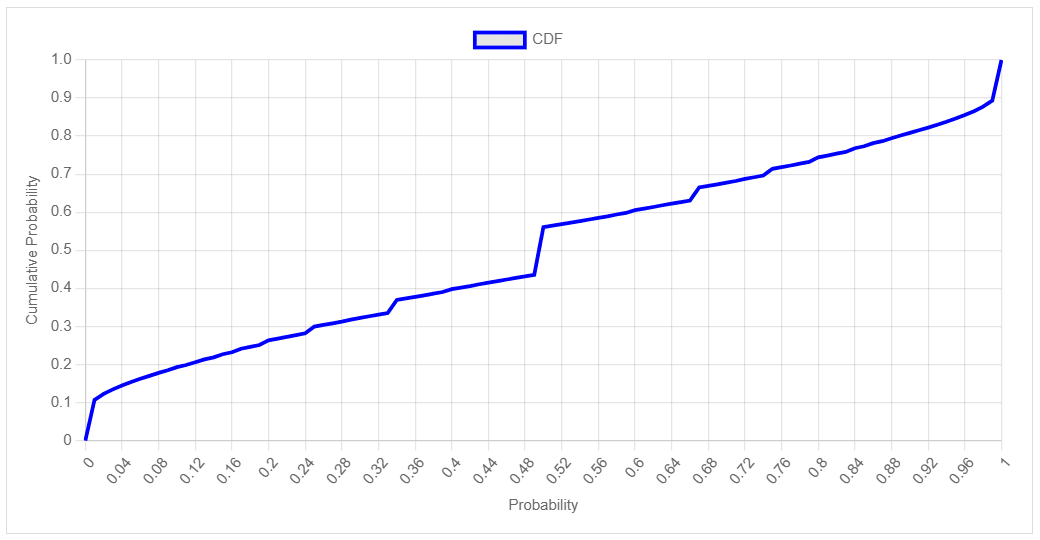
I've built an interactive demo to explore this distribution. The default parameters (w1=0.3, w2=0.1, w3=0.3, w4=0.3, sigma=5, alpha=2) reflect my intuition about the relative frequency of these different types of programs in practice. This gives a more realistic prior for many real-world scenarios where we're trying to infer the behavior of unknown processes that might be deterministic, fair, or genuinely random in various ways.
What do you think? Is there a simple model which serves as a better prior?
Discuss
