


Human-robot collaboration focuses on developing intelligent systems working alongside humans in dynamic environments. Researchers aim to build robots capable of understanding and executing natural language instructions while adapting to constraints such as spatial positioning, task sequencing, and capability-sharing between humans and machines. This field significantly advances robotics for household assistance, healthcare, and industrial automation, where efficiency and adaptability are crucial for seamless integration.
A major challenge in human-robot collaboration is the lack of a comprehensive benchmark to evaluate planning and reasoning abilities in multi-agent tasks. While previous models have addressed navigation and single-agent interactions, they fail to capture real-world complexities where robots must coordinate with humans. Many existing approaches do not account for real-time task tracking, partner adaptation, and effective error recovery. The absence of an established standard makes it difficult to assess and improve collaborative AI performance in interactive settings systematically.
Current approaches in embodied AI often focus on single-agent task execution, disregarding the necessity of coordination in multi-agent scenarios. Some methods rely on templated task instructions, limiting scalability and task diversity, while others depend on manually crafted evaluation functions, making large-scale assessments impractical. Despite advancements, state-of-the-art large language models (LLMs) struggle with task tracking, coordination, and recovery from execution failures. These limitations hinder their ability to function efficiently in human-centric environments where adaptability and precise task execution are essential.
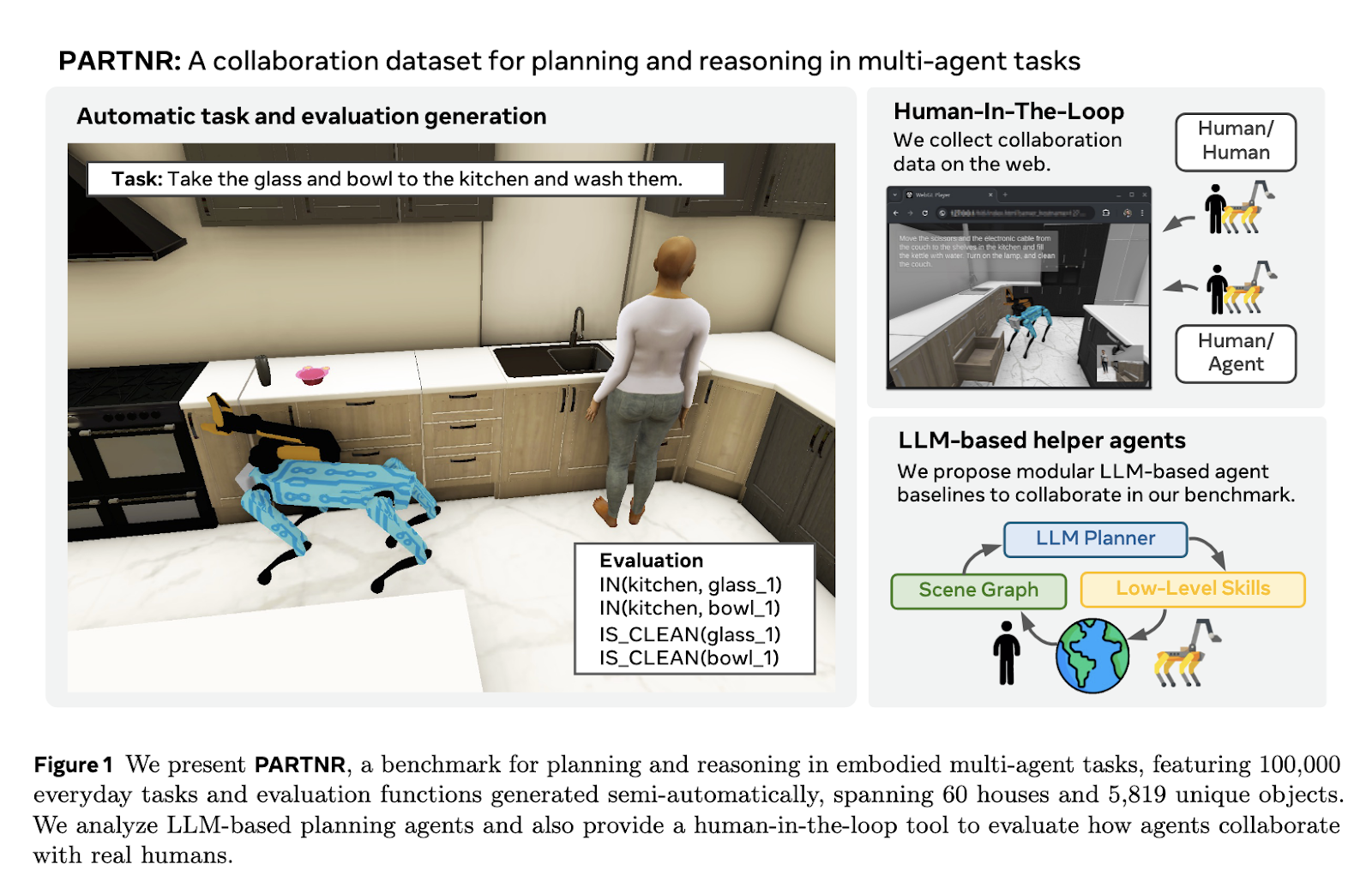
Researchers at FAIR Meta have introduced PARTNR (Planning And Reasoning Tasks in humaN-Robot collaboration), a large-scale benchmark designed to assess human-robot coordination in simulated environments. PARTNR comprises 100,000 natural language tasks, spanning 60 simulated homes and 5,819 unique objects. The benchmark specifically evaluates tasks incorporating spatial, temporal, and heterogeneous constraints. Researchers ensured a realistic and scalable task generation process by leveraging a semi-automated pipeline integrating LLMs and simulation-in-the-loop validation. PARTNR aims to set a standard for evaluating AI’s ability to collaborate with human partners effectively.
Researchers generated task instructions and evaluation functions using LLMs to create the benchmark. These were then filtered through simulation to remove infeasible tasks. The final dataset underwent human-in-the-loop validation to enhance task diversity and ensure accuracy. The tasks in PARTNR fall into four categories: constraint-free, spatial, temporal, and heterogeneous. Constraint-free tasks allow flexibility in execution order, while spatial tasks require specific object positioning. Temporal tasks necessitate ordered execution, and heterogeneous tasks involve actions beyond the robot’s capability, requiring human intervention. These task structures introduce challenges in coordination, tracking, and execution accuracy.
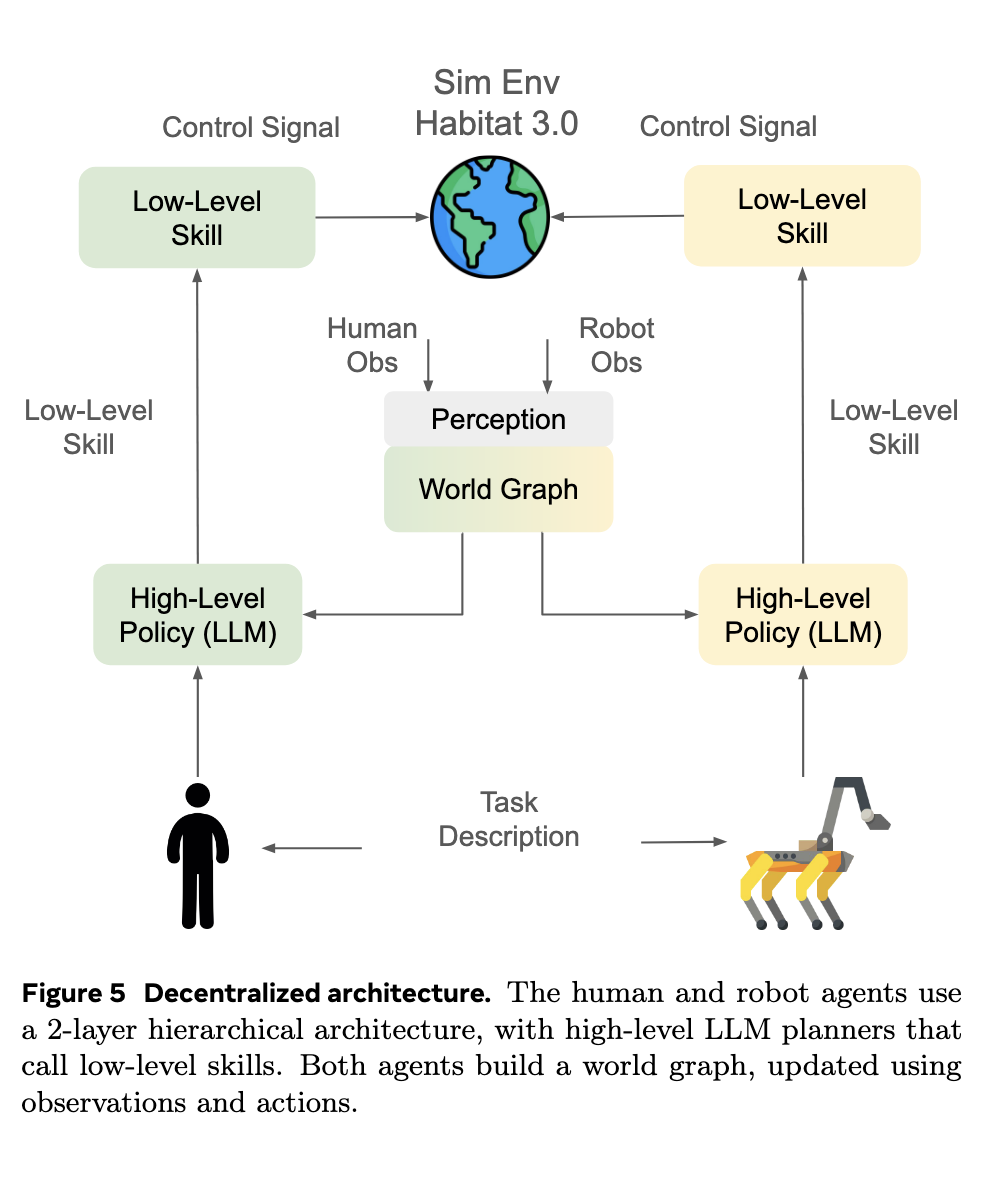
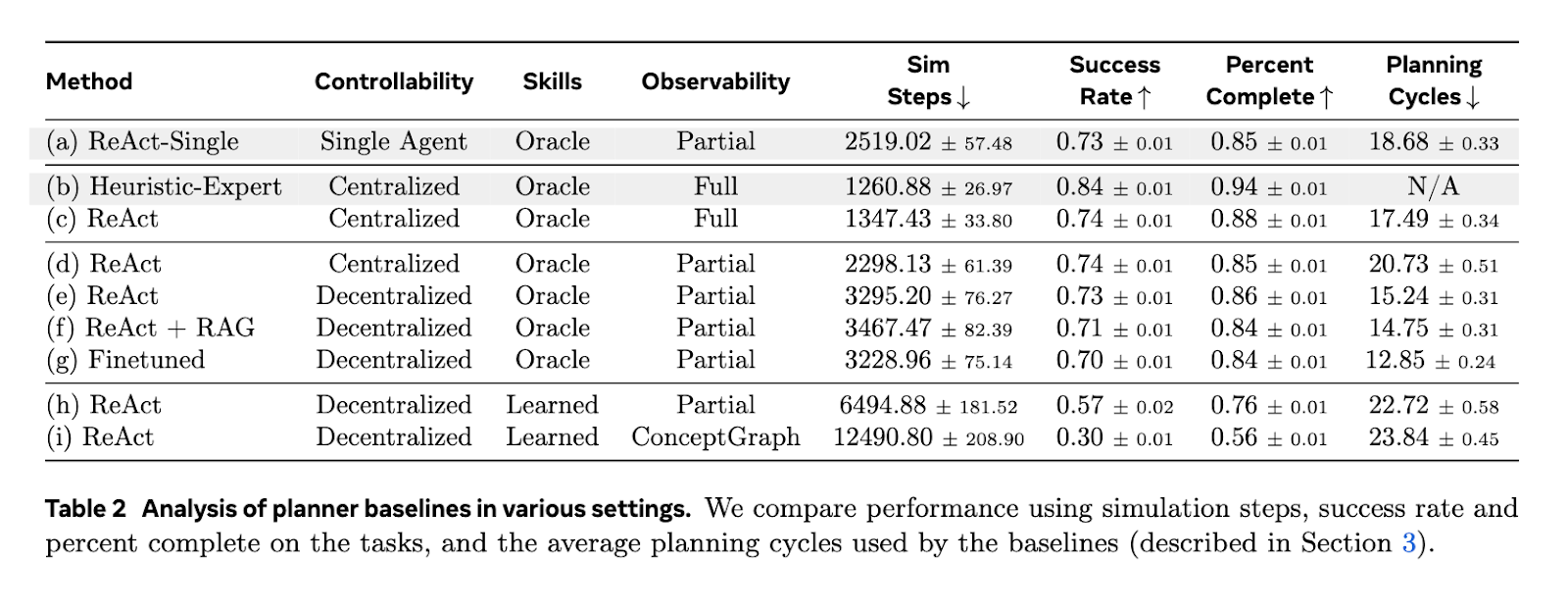
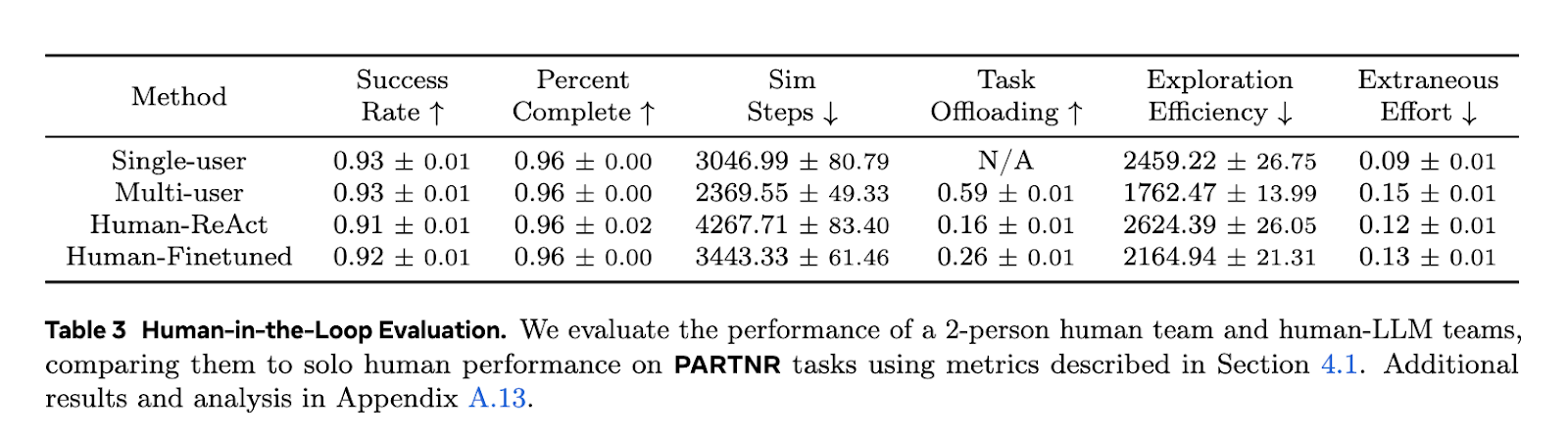
Evaluations of LLM-based planning agents on PARTNR revealed significant limitations in coordination, task tracking, and error recovery. When paired with humans, LLM-guided robots required 1.5 times more steps than human-human teams and 1.1 times more steps than a single human to complete tasks. The success rate of state-of-the-art LLMs was only 30% under non-privileged conditions, compared to 93% when tasks were performed solely by humans. Moreover, fine-tuning smaller LLMs achieved performance comparable to models nine times larger while being 8.6 times faster at inference. In decentralized multi-agent settings, task completion required 1.3 times more steps than a single-agent scenario, demonstrating inefficiencies in current coordination mechanisms.
PARTNR highlights crucial gaps in existing AI-driven human-robot collaboration models, emphasizing better planning, tracking, and decision-making strategies. The findings indicate that despite advancements in AI, human-robot collaboration benchmarks require substantial improvements to bridge the performance disparity between AI models and humans. The structured evaluation framework offered by PARTNR provides a pathway for advancing AI’s ability to collaborate, plan, and execute tasks efficiently. Future research should focus on refining LLM-based planners, improving coordination mechanisms, and enhancing perception models to address current limitations in multi-agent interaction. PARTNR is a valuable resource for driving innovation in collaborative embodied AI systems.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. Don’t Forget to join our 75k+ ML SubReddit.
 Recommended Open-Source AI Platform: ‘IntellAgent is a An Open-Source Multi-Agent Framework to Evaluate Complex Conversational AI System’ (Promoted)
Recommended Open-Source AI Platform: ‘IntellAgent is a An Open-Source Multi-Agent Framework to Evaluate Complex Conversational AI System’ (Promoted)The post Meta AI Introduces PARTNR: A Research Framework Supporting Seamless Human-Robot Collaboration in Multi-Agent Tasks appeared first on MarkTechPost.
