


The study of collective decision-making in biological and artificial systems addresses critical challenges in understanding how groups achieve consensus through simple interactions. Such processes underpin behaviors in animal herds, human groups, and robotic swarms. Recent advances in neuroscience have explored how neural dynamics, oscillations, and phase-locking mechanisms facilitate these decisions in biological systems. However, the application of these dynamics in multi-agent systems still needs to be explored. Bridging this gap can improve group decision-making models, enabling more adaptive and socially intelligent agents for navigation, search, and rescue tasks.
A fundamental issue in this field is the balance between internal dynamics, environmental feedback, and social influences. Agents must adapt their behavior in response to external stimuli while coordinating with peers to reach a shared decision. For instance, agents deciding between two resource locations must integrate their sensory input and social interactions to achieve convergence. Excessive reliance on either internal states or external signals can hinder their ability to make effective decisions. This interplay is particularly relevant in dynamic environments with conflicting stimuli.
Traditional models, such as opinion dynamics or heuristic-based rules, have provided insights into consensus-building. These approaches typically rely on simple majority rules or pre-defined algorithms for alignment. While useful, these models often ignore the complex neural and sensorimotor mechanisms underlying biological systems’ decision-making. For example, models like Kuramoto oscillators describe synchronization but lack a direct link to embodied behavior. Few existing approaches address the neural dynamics that drive coordination across agents in real-world scenarios.
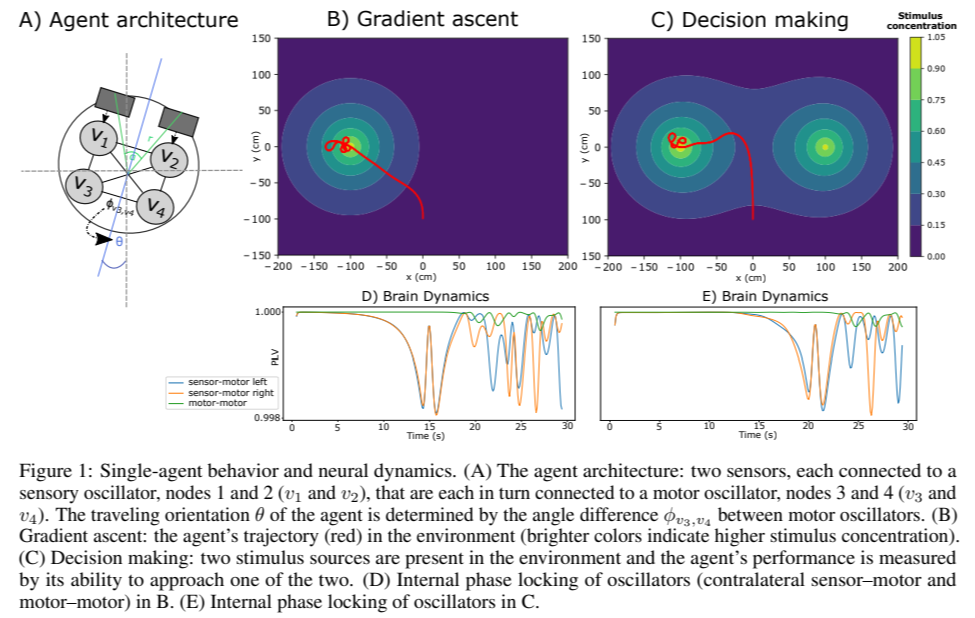
The researchers from Université Libre de Bruxelles, Université de Montréal, Universiteit Gent, and Mila—Quebec AI Institute introduced a multi-agent model incorporating biologically plausible neural dynamics designed to mimic the sensorimotor feedback and brain oscillations seen in nature. The system used oscillatory models governed by Haken-Kelso-Bunz equations to simulate metastable neural states, enabling agents to adjust to environmental and social conditions dynamically. The agents featured sensory and motor oscillators interacting within a closed loop, allowing them to navigate stimulus gradients and coordinate movements with peers.
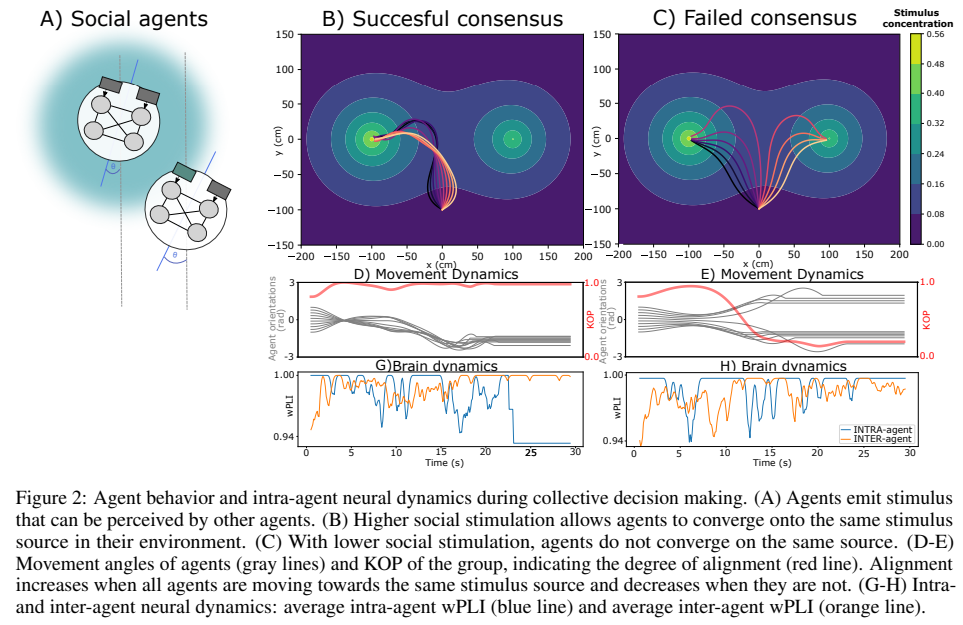
The proposed system’s architecture included four oscillators: two sensory nodes for stereovision and two motor nodes for differential drive steering. Sensory input was integrated into the neural controller, enabling agents to detect stimulus gradients and adjust their heading accordingly. Social interactions modeled as stimulus emission enhanced the coordination between agents, where agents influenced each other based on proximity. Neural dynamics were fine-tuned by adjusting coupling parameters, sensory sensitivity, and social influence, creating a balance between environmental responsiveness and group alignment.
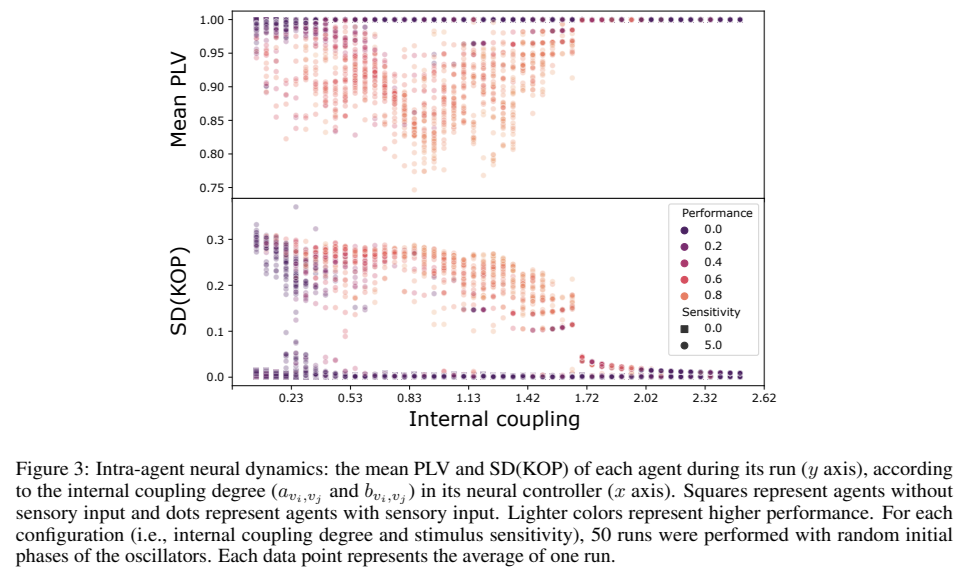
Performance was evaluated across 50 simulations with varying parameters. The agents achieved peak performance when internal coupling ranged between 0.8 and 1.5, with sensory sensitivity set at five and social influence at 1. Agents displayed high metastability at these values, enabling flexible yet coordinated behavior. In binary decision-making scenarios, agents succeeded in selecting one of two stimulus sources, with performance improving as the quality difference between stimuli increased. When social influences dominated, or internal dynamics became overly rigid, performance dropped, demonstrating the necessity of a balanced approach.
The results revealed several key takeaways from the study:
- Optimal Coupling: Agents performed best with moderate internal coupling (0.8 to 1.5), balancing flexibility and alignment.Environmental Sensitivity: Sensory input significantly influenced neural dynamics, with higher input driving rapid state changes but requiring moderation to avoid instability.Social Influence: Effective coordination required social influence values of approximately 1, beyond which agents became overly reliant on peers and failed to engage adaptively with the environment.Consensus Challenges: Variations in initial agent orientations and stimulus source quality ratios affected convergence, highlighting the interplay between individual and group dynamics.Metastability: Agents operating in a metastable neural regime demonstrated greater adaptability, successfully navigating conflicting stimuli and achieving group alignment.

In conclusion, this research bridges neuroscience and artificial intelligence by demonstrating how biologically inspired neural dynamics can enhance collective decision-making in multi-agent systems. By integrating sensorimotor feedback, social interactions, and metastable neural states, the study provides a robust framework for designing intelligent agents. These findings pave the way for future applications in collaborative robotics, swarm intelligence, and adaptive systems capable of operating in complex environments.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter.. Don’t Forget to join our 55k+ ML SubReddit.

 ‘
‘The post Bridging Neural Dynamics and Collective Intelligence: A Study on Adaptive Multi-Agent Systems for Effective Consensus-Building in Complex and Dynamic Environments appeared first on MarkTechPost.
