


The field of robotics is seeing transformative changes with the integration of generative methods like large language models (LLMs). These advancements enable the developing of sophisticated systems that autonomously navigate and adapt to various environments. The application of LLMs in robot design and control processes represents a significant leap forward, offering the potential to create robots that are more efficient & capable of performing complex tasks with greater autonomy.
Designing effective robot morphologies presents substantial challenges due to the expansive design space and the traditional reliance on human expertise for prototyping and testing. Creating, testing, and iterating on robot designs takes time and effort. Engineers must navigate a vast array of potential configurations, which requires significant computational resources and time. This bottleneck in the design process highlights the need for innovative approaches to streamline and optimize robot design, reducing the dependency on manual intervention and speeding up the development cycle.
Current methods for robot design typically combine manual prototyping, iterative testing, and evolutionary algorithms to explore different configurations. While proven effective, these approaches are limited by the extensive computational resources and time required to navigate the design space. Evolutionary algorithms, for example, simulate numerous iterations of robot designs to find optimal configurations, but this process can be slow and resource-intensive. This traditional approach underscores the need for more efficient methods to accelerate the design process while maintaining or enhancing the quality of the resulting robots.
Researchers from the Univerity of Warsaw, IDEAS NCBR, Nomagic, and Nomagic introduced RoboMorph, a groundbreaking framework that integrates LLMs, evolutionary algorithms, and reinforcement learning (RL) to automate the design of modular robots. This innovative method leverages the capabilities of LLMs to efficiently navigate the extensive robot design space by representing each robot design as a grammar. RoboMorph’s framework includes automatic prompt design and an RL-based control algorithm, which iteratively improves robot designs through feedback loops. Integrating these advanced techniques allows RoboMorph to generate diverse and optimized robot designs more efficiently than traditional methods.
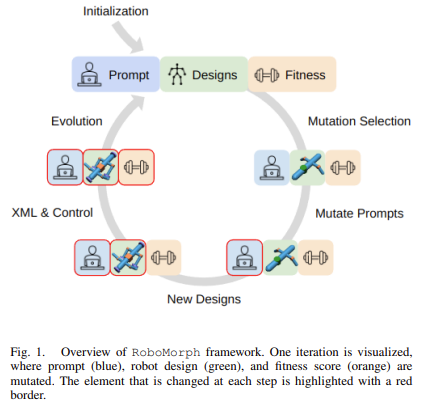
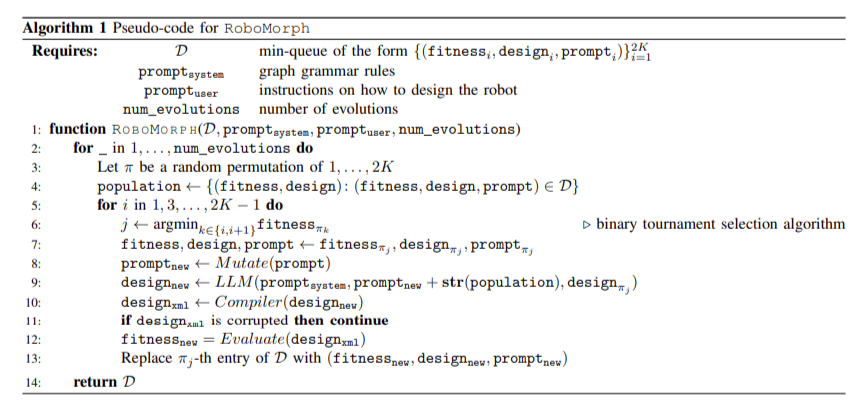
RoboMorph operates by representing robot designs as grammars, which LLMs use to explore the design space. Each iteration begins with a binary tournament selection algorithm that selects half of the population for mutation. The selected prompts are mutated, and the new prompts are used to generate a new batch of robot designs. These designs are compiled into XML files and evaluated using the MuJoCo physics simulator to obtain fitness scores. This iterative process enables RoboMorph to improve robot designs over successive generations, showcasing significant morphological advancements. Evolutionary algorithms ensure a diverse and balanced selection of designs, preventing premature convergence and promoting the exploration of novel configurations.
The performance of RoboMorph was evaluated through experiments involving ten seeds, ten evolutions, and a population size of four. Each iteration involved the mutation of prompts and the application of the RL-based control algorithm to compute fitness scores. The fitness score, the average reward over 15 random rollouts, indicated a positive trend with each iteration. RoboMorph significantly improved robot morphology, generating optimized designs that outperformed traditional methods. The top-ranked robot designs, tailored for flat terrains, showed that longer body lengths and consistent limb dimensions contributed to improved locomotion and stability.
RoboMorph presents a promising approach to addressing the complexities of robot design. By integrating generative methods, evolutionary algorithms, and RL-based control, the researchers have developed a framework that streamlines the design process and enhances the adaptability and functionality of robots. The framework’s ability to efficiently generate and optimize robot designs demonstrates its potential for real-world applications. Future research will focus on scaling experiments, refining mutation operators, expanding the design space, and exploring diverse environments. The ultimate goal is to integrate further the generative capabilities of LLMs with low-cost manufacturing techniques to design robots suitable for a wide range of applications.

In conclusion, RoboMorph leverages the power of LLMs and evolutionary algorithms to create a framework that streamlines the design process and produces optimized robot morphologies. This approach addresses the limitations of earlier methods and offers a promising pathway for developing more efficient and capable robots. The results of RoboMorph’s experiments highlight its potential to revolutionize robot designs.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter.
Join our Telegram Channel and LinkedIn Group.
If you like our work, you will love our newsletter..
Don’t Forget to join our 46k+ ML SubReddit
The post RoboMorph: Evolving Robot Design with Large Language Models and Evolutionary Machine Learning Algorithms for Enhanced Efficiency and Performance appeared first on MarkTechPost.
