
好家伙,宇树机器人“肇事逃逸”这瓜,在国外都好火啊!
油管、Reddit、X上这个片段都在疯传ing,还有不同角度版本,全世界全方位围观。
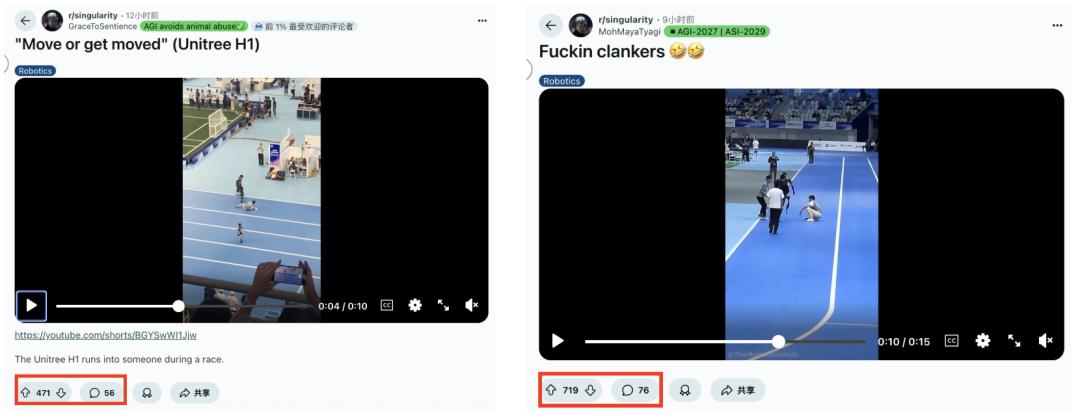
大家都很担心,又有人类被机器人伤害到了。
它甚至都没有停下来确认人类是否OK,太典了。

这已经违反阿西莫夫的机器人原则了:第一条,不得造成伤害,否则将立刻被“摧毁”。
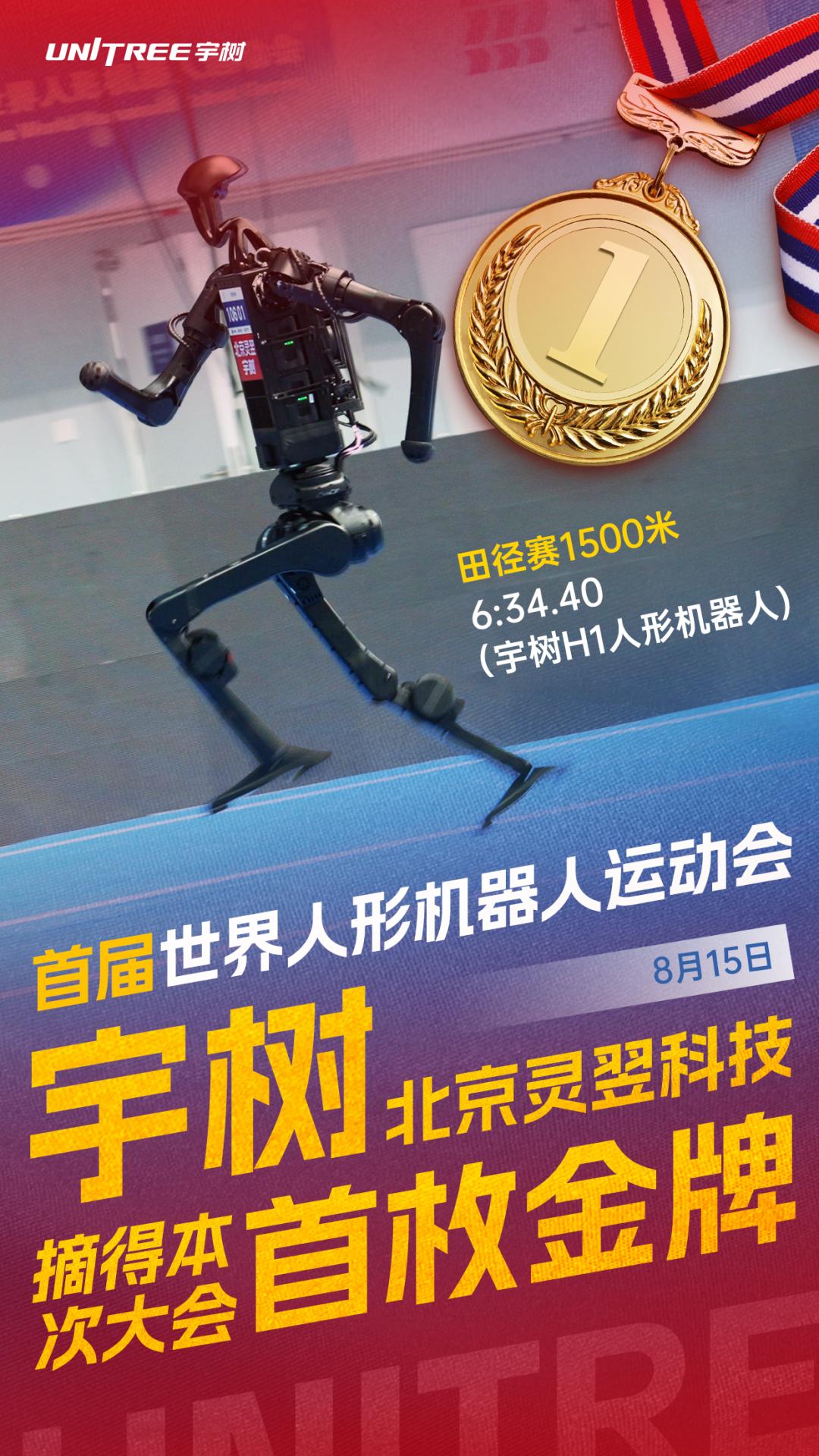
但是昨天宇树机器人撞人后还拿了个1500米第一,摘得首届人形机器人运动会的首金。
这……真的是可以的吗?
一片议论中,这场“事故”被反复分析,发现好像锅——也不完全是机器人的。
其实是人类出了问题
昨天,宇树机器人以6分34秒(人类世界纪录为3分26秒)的成绩取得1500米田径第一名,系本次人形机器人运动会首金,也创造了世界纪录。
而且参赛过程中马上要套圈对手了,它突然减速开始在场子里乱转圈,主打一个凡尔赛。

当然要论名场面,那还得是全网热议的“撞人逃逸”事件。
不过随着列文虎克的上岗,这次事件的“元凶”也开始浮出水面——导致宇树机器人撞人的,极有可能是人类。
在撞击发生的前一刻,刚好是两名人类控制员交接遥控器的时间,两人交接过程当中没有注意到前面的人,未能及时发出避让指令。

有网友调侃说,这一定是一种击败对手的手段。
毕竟高端的商战,往往只需要采用最朴素的方式。
不过有一说一,机器人比赛跑步,为啥需要遥控呢?
至于具体原因,一方面关于机器人自身的稳定性,主要是由于动态平衡问题。跑步是一种高度不稳定的运动方式,机器人必须在极短时间内完成身体姿态的调整。
但是,现有的传感器、算法和执行器的反应速度与精度还不足以在各种复杂地形上稳定应对,人工遥控能在机器人即将失衡时提供及时干预。
比如宇树的另一款机器人G1,今年4月就被第三方用来参加机器人半程马拉松,在比赛过程中出现了摔倒的状况。
另一方面则是对环境感知不足。虽然传感器可以提供环境信息,但在快速奔跑时,这些感知数据常常存在延迟或精度不足,机器人难以像人类一样快速判断。人工遥控能弥补机器人自主感知的不足。
这次机器人只是短暂脱离遥控就发生撞人事件,也刚好说明了这一点。
当然需要明确的是,机器人并非完全不能脱离遥控自主运动,比如这次1500米比赛的亚军——北京人形机器人创新中心研发的天工Ultra机器人——在赛跑时就没用遥控。

△
包括这次“肇事”的宇树H1(今年春晚上表演扭秧歌的同款),其实也具备一定的无遥控自主运动能力。
H1是宇树的首款通用人形机器人,诞生于2023年8月。
它身高一米八,体重47公斤,M107电机扭矩360牛·米,单腿和单臂分别拥有5个和4个自由度,感知层面则配备了3D激光雷达和深度相机。
H1的移动速度3.3米每秒,潜在性能大于5米每秒(18公里每小时),本次比赛中的平均速度则是3.8米每秒。
另外,回到机器人运动这个问题,是否需要进行遥控,也和具体的运动项目存在关联。
一些项目现阶段更想体现机器人的运动能力,比如自由搏击项目,也是人类操纵机器人出拳出腿。
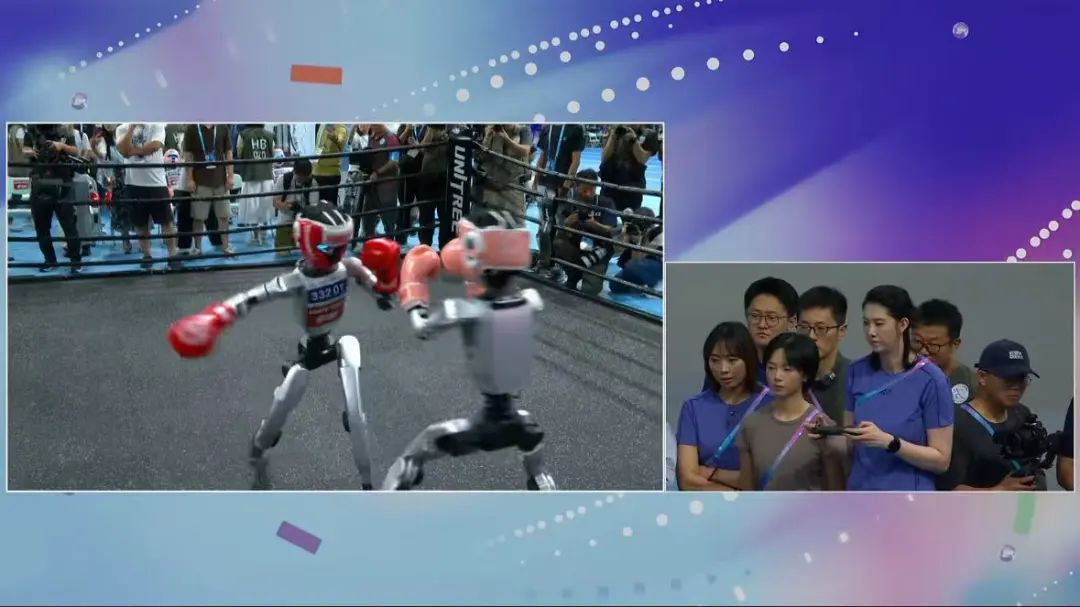
这个项目更加考验机器人的重心是否合理,是否能在承受对手重击后不倒地。背后涉及机器人腿部电机、关节等硬件部件的设计。

以及人类控制也能让进攻防守更灵活迅速,这样同样可以测试机器人在激烈对抗下的硬件性能。
但是足球比赛项目就是完全机器人自主完成,这个项目可能更想测试机器人的策略判断和协作能力。

可以看到机器人踢球的动作幅度、灵活性都比较受限,摔倒的情况也时有发生。
但是何时该出脚、何时该挡人防守、判断谁是队友谁是对手、怎么和队友使用战术,这些就都是机器人自主判断了。
而且在比赛中,机器人也能像人类一样找回状态,算法还是那一套,但是下半场表现就能比上半场更好。
感觉人形机器人运动会的项目,更多还是考验它们的单项能力,可能是“大脑”、可能是“四肢”。
不过也别沮丧,人形机器人发展的速度远超咱们想象,这不宇树创始人、CEO王兴兴昨天在采访中已经表示,下次比赛时要让机器人选手自主奔跑。
王兴兴:机器人犯错时讨论总是更多
昨天在运动会现场,王兴兴围观了自家机器人比赛。
对于拿金牌这事,他表示完全在意料之中,这次也不是宇树H1取得的最好成绩,没有达到5米/秒的最高速度。
这次好成绩也让他松了一口气:前几个月我们在网上被“黑”得实在受不了。
同时还透露今年下半年、明年,宇树机器人有更多突破。
对于使用遥控这件事,王兴兴回应,宇树的H1其实也具备了不用遥控器的能力,但因为策略不同,为追求速度,宇树最后在赛场中仍然采用了遥控策略。
这么做当然也有缺点,“比较废同事”,操作员跟跑会体力严重透支,所以我们也看到现场操作员们需要接力陪伴机器人完成比赛。
下次比赛我们肯定是全自主的,这并没有难度。
明年一定会参加北京亦庄半程马拉松暨人形机器人半程马拉松。

在更早之前,王兴兴在采访中也聊到了大众格外关注机器人“闯祸”的问题。
现在,机器人正常走路、跑步,关注比较少。但是如果机器人因为操作或者某种原因出点问题,讨论就会爆多。
我觉得每个人对新技术、新产品都还是要抱有更开放的心态,对于每个行业而言,多多少少都有起伏,我觉得包括我在内,大家应该更开放接受这些起伏,对它的未来抱有更大的信心和支持。
参考链接:[1]https://www.reddit.com/r/singularity/comments/1mqywla/move_or_get_moved_unitree_h1/[2]https://www.reddit.com/r/singularity/comments/1mr4h4t/fuckin_clankers/[3]https://finance.sina.cn/stock/jdts/2025-08-15/detail-infmapwz2739811.d.html?vt=4&cid=76993&node_id=76993
本文来自微信公众号“量子位”,作者:关注前沿科技,36氪经授权发布。
