
从手机随手拍、汽车行车记录仪到无人机航拍,如何从海量无序二维图像快速生成高精度三维场景?
传统方法依赖精确的相机位姿参数,实际应用成本高昂。港科广团队提出全新框架GraphGS,突破技术瓶颈——无需精准相机位姿,仅凭RGB图像即可实现大规模开放场景的高效重建和高保真新视角合成,相关论文入选ICLR 2025,代码即将开源。
技术痛点与突破
传统方法瓶颈:
现有三维重建技术通常依赖精确的相机位姿参数和密集视角覆盖,而实际应用中,由于设备限制或环境复杂性,获取高精度位姿和充足视角面临巨大挑战。
例如,COLMAP等传统SfM工具处理千张级图像需要数天时间,且容易因动态物体或重复纹理导致匹配失败。此外,稀疏视角下3D高斯点易过拟合到有限视角区域,导致几何失真和细节丢失。
GraphGS核心突破:
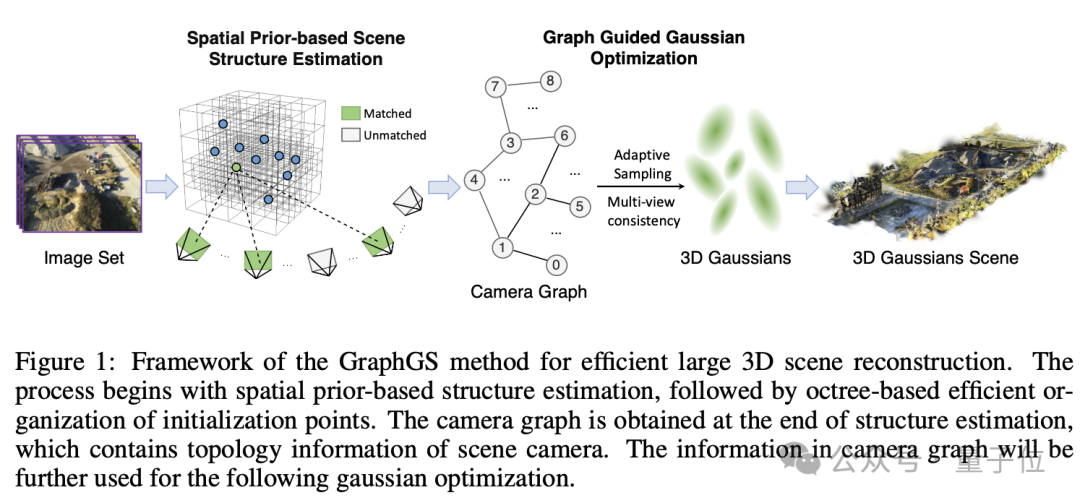
GraphGS通过创新的空间先验感知与图引导优化范式,提出三阶段解决方案:
首先利用数学策略从无序图像中快速构建相机拓扑图
其次通过多视角一致性约束强化几何连贯性
最后结合自适应采样策略动态优化高斯点分布。
该方法在保障精度的同时,将千张图像的重建时间从数十小时缩短至数小时。
方法详解:
GraphGS的核心在于将复杂的场景重建问题转化为图结构优化问题。
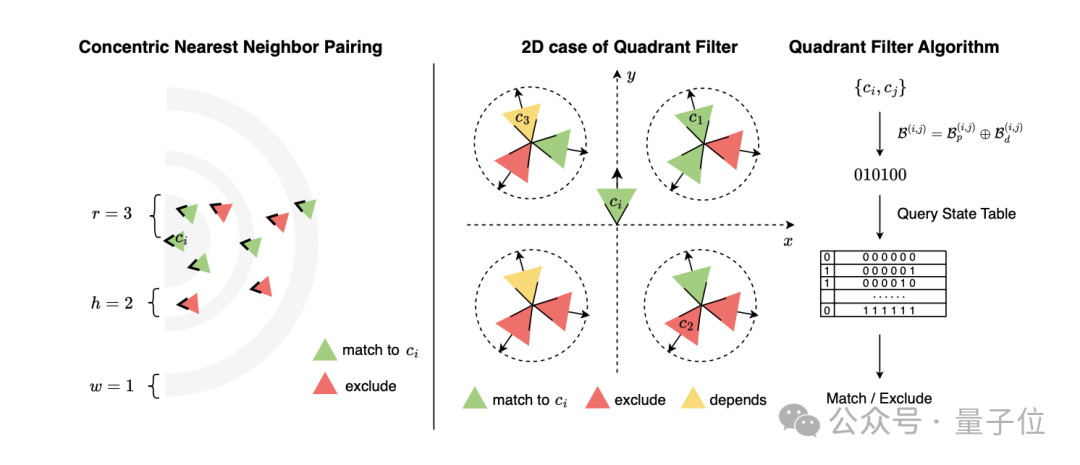
框架首先通过同心圆近邻配对和三维象限过滤策略,从海量图像中智能筛选关键匹配对,仅需平面相机位置即可构建连通相机拓扑图;随后将相机间的空间关系建模为带权无向图,通过多视角光度一致性损失和基于节点重要性的自适应采样策略,引导3D高斯点向全局最优分布演化。这一过程结合了传统几何约束与现代可微分渲染的优势,在保证重建精度的同时显著提升计算效率。
1. 高效匹配:
传统方法(如COLMAP)需遍历所有图像对(复杂度O(n²)),GraphGS通过数学策略筛选关键帧:
- 同心圆近邻配对:按距离分层采样,确定局部与全局关键帧,从万级图像对中筛选千级关键帧,解决COLMAP暴力匹配耗时难题。
象限过滤:6位编码量化相机相对位姿,过滤无效匹配,消除长街景“断链”风险。
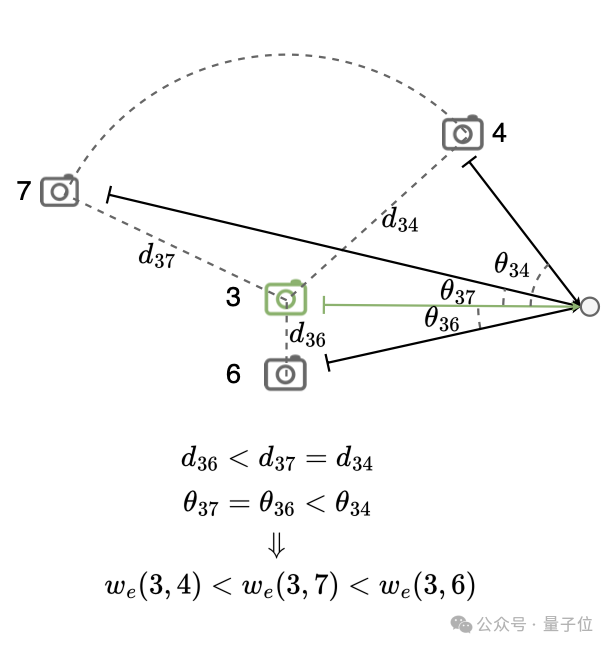
2. 相机图优化:
多视角一致性约束:构建相机拓扑关系图,通过多视角一致性损失函数强化相邻视角几何一致性。动态平衡相邻视角差异,解决模糊、鬼影问题。
自适应采样:节点通过介数中心性动态调整采样频率,解决稀疏视点导致的伪影问题同时加快3DGS训练速度。
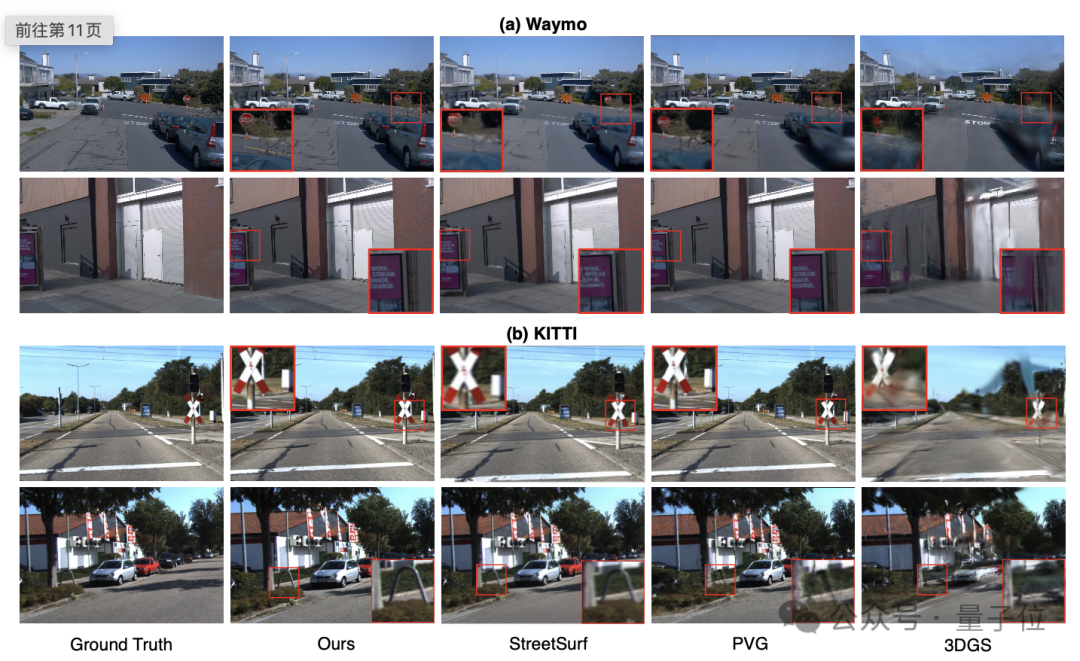
实测效果:街景、废墟、噪声场景全覆盖
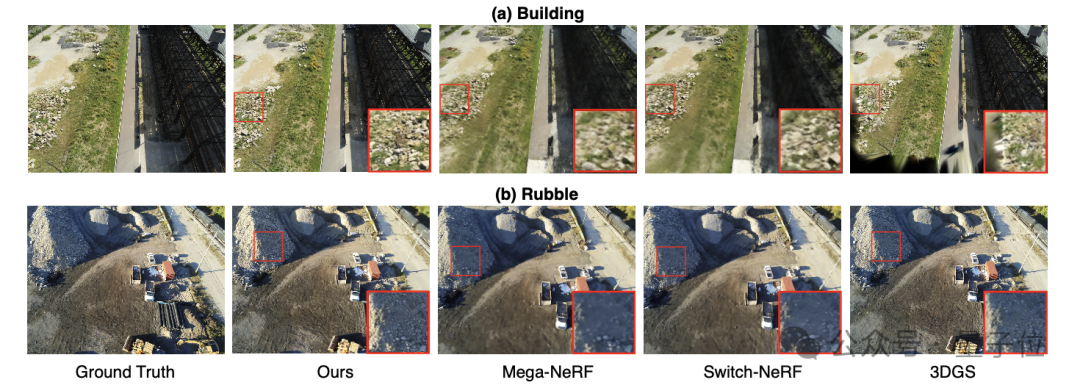
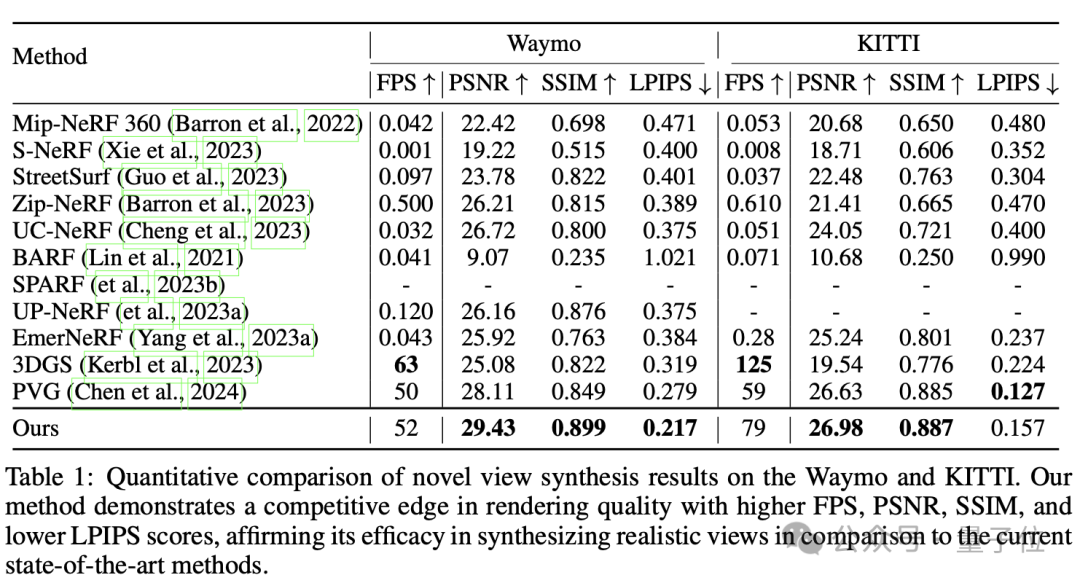
在Waymo、KITTI等自动驾驶数据集上,GraphGS在无真值位姿输入的情况下达到29.43 PSNR和26.98 PSNR,街景重建准确,树枝纹理、车窗倒影清晰可见。面对Mill-19数据集同样不使用真值位姿,该方法在碎石堆积、墙体断裂等极端场景下仍能实现高质量新视角合成,碎石、断墙细节清晰重现。
应用场景:低门槛三维数字化
任意随拍视频,无需真实位姿重建结果展示,左侧为GT,右侧为重建场景。可以看到GraphGS实现了开放场景重建技术的三重突破:首次在无精确位姿输入条件下达成工业级重建精度,将千张图像处理速度提升至小时级,并支持消费级硬件实现平方公里级场景重建。这项技术不仅降低了三维数字化的硬件门槛,更为虚拟现实、智慧城市等领域提供了新的基础设施。
手机三维建模: 用户环拍建筑、街景,自动生成元宇宙素材。
自动驾驶训练:车载摄像头数据直接生成高清地图。
城市数字化:无人机航拍公园,高效重建三维档案。
论文标题:Graph-Guided Scene Reconstruction from Images with 3D Gaussian Splatting
项目主页:https://3dagentworld.github.io/graphgs/
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
— 完 —
学术投稿请于工作日发邮件到:
ai@qbitai.com
标题注明【投稿】,告诉我们:
你是谁,从哪来,投稿内容
附上论文/项目主页链接,以及联系方式哦
我们会(尽量)及时回复你

🌟 点亮星标 🌟
内容中包含的图片若涉及版权问题,请及时与我们联系删除
