


Robotic task execution in open-world environments presents significant challenges due to the vast state-action spaces and the dynamic nature of unstructured settings. Traditional robots struggle with unexpected objects, varying environments, and task ambiguities. Existing systems, often designed for controlled or pre-scanned environments, lack the adaptability required to respond effectively to real-time changes or unfamiliar tasks. These limitations highlight the urgent need for more flexible, scalable approaches to enable robots to handle complex, long-horizon tasks using natural language commands. A crucial challenge is ensuring robust, real-time decision-making and error recovery, which are essential for achieving reliable task completion in diverse, unstructured environments.
Current robotic systems for task planning typically utilize methods like finite state machines, domain-specific languages (e.g., PDDL), or reinforcement learning models. These methods, while effective in constrained scenarios, are limited by their reliance on structured environments and significant amounts of data. Hierarchical and imitation learning methods offer alternatives but are often hindered by their computational complexity and the need for extensive training datasets. These approaches also face scalability issues, struggling to adapt when introduced to new, unpredictable environments. The primary limitation of these methods is their fragility and inability to recover from errors dynamically, making them unsuitable for real-time applications in highly variable environments like homes or industrial sites.
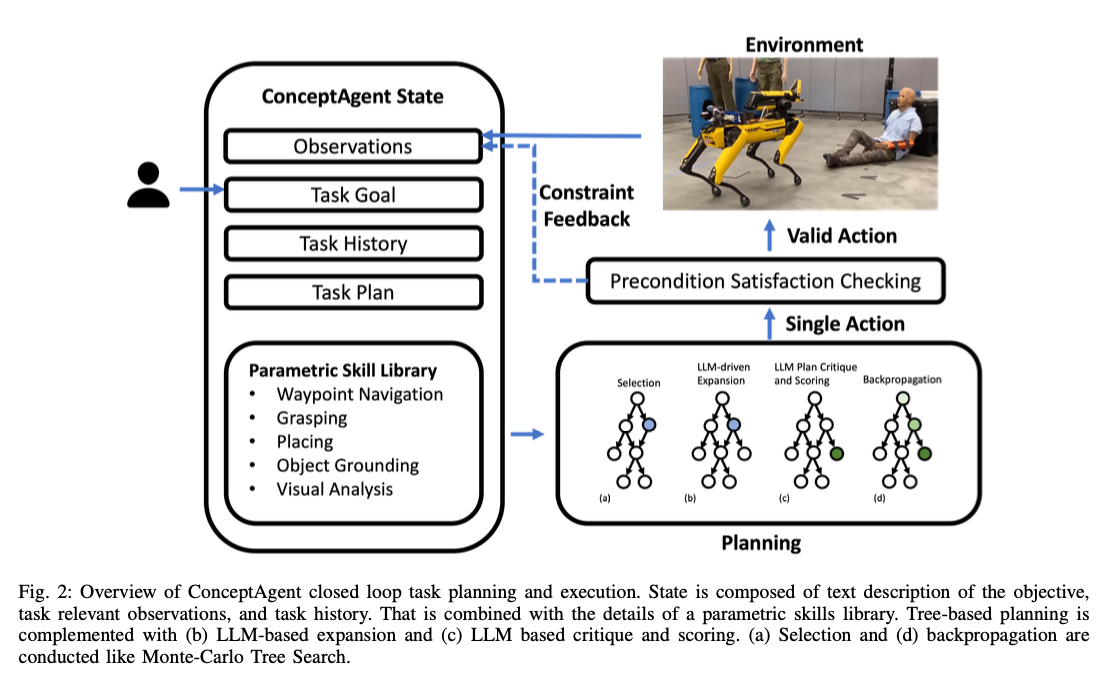
Researchers from MIT, JHU, and DEVCOM ARL have introduced ConceptAgent, an AI system designed to improve task planning and execution in unstructured environments. ConceptAgent incorporates two key innovations:
- Predicate Grounding: A formal method that verifies the feasibility of an action before execution by checking preconditions, preventing infeasible actions, and enabling failure recovery.LLM-Guided Monte Carlo Tree Search (LLM-MCTS): This approach enriches traditional tree search with dynamic self-reflection, allowing the robot to explore multiple future states and refine its plans efficiently. By leveraging the reasoning power of LLMs, ConceptAgent can dynamically generate and adjust task plans, ensuring effective task completion in large and complex environments.
These innovations significantly improve the system’s ability to handle real-time decision-making, making it more adaptable and scalable than existing methods.

ConceptAgent operates within simulation environments such as AI2Thor and real-world setups involving robotic platforms like Spot. It leverages LLMs to enhance traditional Monte Carlo Tree Search with dynamic, self-reflective planning. The system’s core functionality revolves around 3D scene graphs, which provide real-time abstractions of the robot’s surroundings. These scene graphs are aligned with natural language instructions, allowing ConceptAgent to interpret and react to task-specific commands more effectively.
For experimental validation, the researchers employed a dataset of 30 simulated object rearrangement tasks in kitchen environments, supplemented by 40 additional tasks categorized as moderate and hard. These tasks test the agent’s ability to handle increasing complexity, including hidden objects and ambiguous task descriptions. The results were further bolstered by real-world trials, where the ConceptAgent-guided Spot robot performed mobile manipulation tasks in randomized, low-clutter environments.
ConceptAgent showed a notable improvement in task performance across both simulated and real-world environments. In the simulation, it achieved a task completion rate of 19% for easy-level object rearrangement tasks, significantly outperforming baseline models like ReAct and Tree of Thoughts, which had completion rates of around 8-10%. Additionally, in moderate and hard tasks, ConceptAgent demonstrated a 20% increase in task success due to the integration of precondition grounding and LLM-MCTS, confirming the efficacy of these components. In real-world trials, where a Spot robot was tested in randomized, low-clutter environments, ConceptAgent successfully completed 40% of tasks, highlighting its strong performance in mobile manipulation tasks. The system’s overall results underscore its enhanced planning efficiency, adaptability, and ability to recover from errors, making it a robust solution for complex, open-world robotic applications.

In conclusion, ConceptAgent provides an advanced solution to the persistent challenges of task planning and execution in open-world environments. By integrating predicate grounding and LLM-guided tree search, the system enhances adaptability, enabling robots to perform tasks in dynamic, unpredictable settings. These contributions are pivotal for advancing the field of robotics, as they address key limitations of existing approaches and pave the way for more flexible, error-tolerant task execution systems. ConceptAgent’s demonstrated success in both simulated and real-world trials highlights its potential for wide application in domains such as home automation, healthcare, and industrial robotics.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter.. Don’t Forget to join our 50k+ ML SubReddit
[Upcoming Event- Oct 17 202] RetrieveX – The GenAI Data Retrieval Conference (Promoted)
The post ConceptAgent: A Natural Language-Driven Robotic Platform Designed for Task Execution in Unstructured Settings appeared first on MarkTechPost.
